My Projects

Bachelor Thesis
Deep learning surface quality assessment system for robotic grinding.

Human-Robot Interaction
Latent Strategies for Ad-Hoc Human-Robot Teaming in Overcooked AI.

Real-to-Sim Motion Transfer
iLQG (iterative Linear Quadratic Gaussian) controller to transfer real human motion into physics simulation.

Exoskeleton Safety Controller
Hamilton-Jacobi reachability combined with soft actor-critic reinforcement learning for safe control.
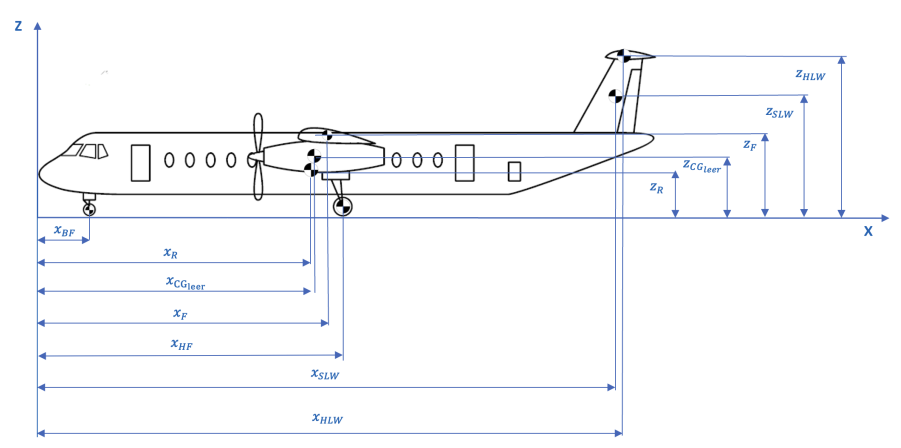
Turboprop Airplane Design and Validation
Concept design for a turboprop airplane validated with comprehensive flight scenario analysis and load-case calculations.

Space Telescope Aperture Mechanism Design and Validation
Aperture cover mechanism for a space telescope, featuring a custom launch-lock for instantaneous orbit detachment.